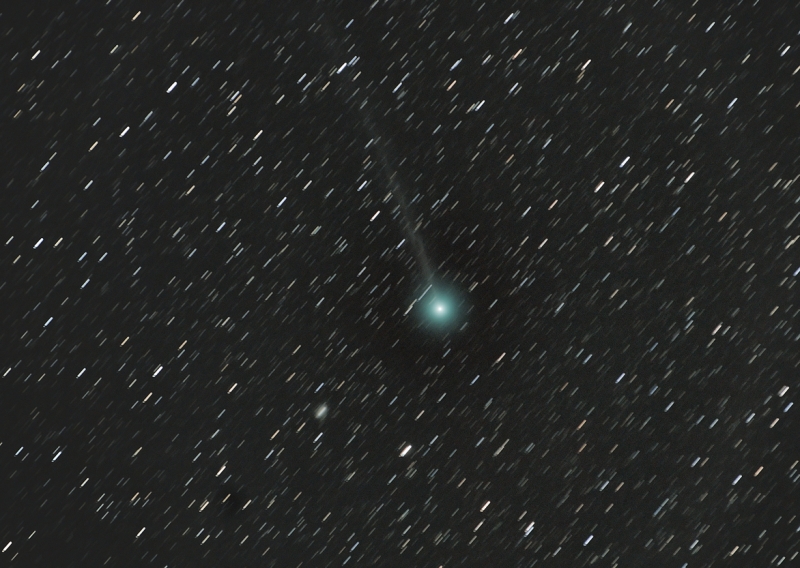
由於懶惰和天氣問題, 上次攝星和測試 Raspberry pi3 已是上年年尾, 這年寫的網頁介面終於能正式測試, 今次測試包括透過手機瀏覽器遙控 DSLR 作拍攝、dithering 、 監控每張照片品質和 offline plate solving。各操作測試都達預期效果, 而 DSLR 遙控和 local plate solving 網頁控制還有改善空間。
由於太耐沒練習, 錯漏百出, 帶漏東西又影錯 flat 和 dark 的 iso, 待月落後以 M31 作測試目標, 兩個多小時就回家, 多謝 Ryan 作伴。
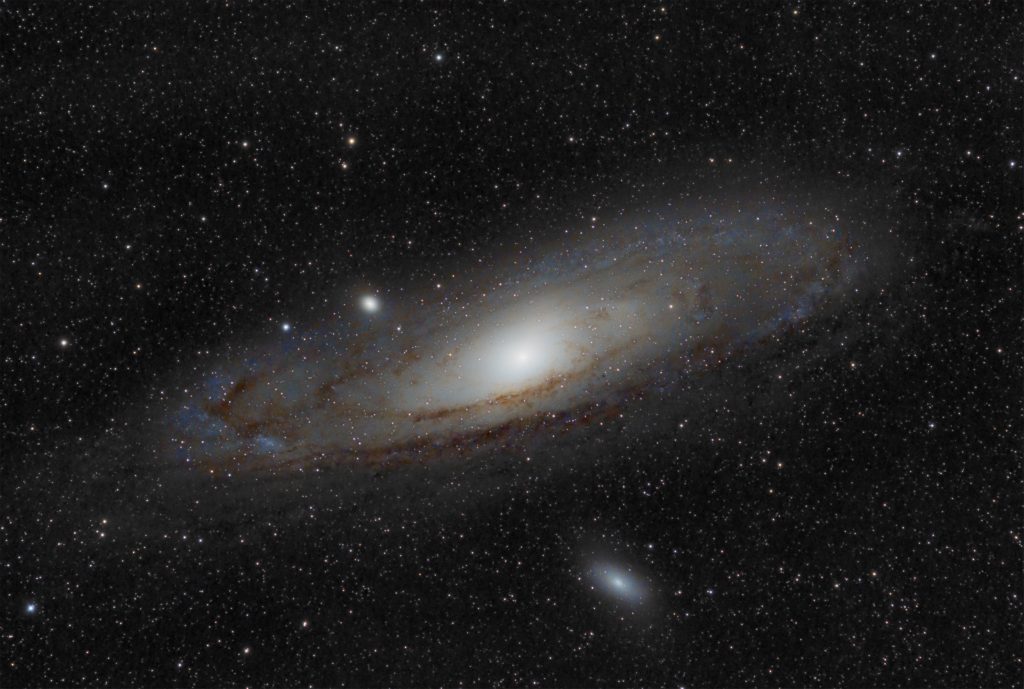
M31
D810A
50 x 88s (1 hour 14 min), 34 flat, 5 dark, 40 bias
Vixen ED80sf with reducer/flattener
Vixen GP2
Raspberry pi3
gphoto2 DSLR control
QHY5II L mono (30mm mini guide scope with 120mm focal length)
Lin guider autoguiding and dithering
Process with DSS, PixInsight and Photoshop
這兩年學習 autoguide 的過程中, 發現 GP2 guiding performance 不太理想, 人為因素當然是對極不準、線材安排不當、平衡或鋼性不足等問題, 但以 GP2 極軸鏡的設計加上我現在的對極技巧, 實在難以達到攝星所需的精度。 由於精度不足而致 DEC 修正頻繁, 但對沒有 beaing 和只有 1.5x guiding rate 的 GP2 來説實在有點困難, 尤其是大距離的 dither 後。現在我只好乖乖地學習怎樣 drift alignment 來減少 DEC 的誤差, 以往在對極準確的情況下, 10 分鐘(Flame and Horsehead Nebula) 或以上絶無問題, 這亦反映 GP2 精度十足。
下一步計劃是嘗試利用 Lin guider 的 guiding graph 來協助 drift alignment。