
對上一次拍星應該是上年了, 其實每年平均只能拍兩至三次星, 要配合輪班工作、天氣和朋友不是一件容易的事。由於可以拍攝的機會實在不多, 所以完全沒有動力添置攝星器材, 免得變成收藏家作供奉之用, 對於沒有自駕的我, 唯一考慮可能是減輕器材重量, 使得拍攝更加方便 。
等了這麼久才等到好天、無月和不用返工的日子, 心裡很想輕輕鬆鬆拍些從來沒拍過的 DSO, 但自己的 Raspberry pi project 裏的對極軟件 PPA 還沒有機會測試, 唯有犧牲部分寶貴的晴天時間來測試。到達主場大㘭門時已接近 9:30 ,趕快 setup 器材後作 PPA 測試, 但大㘭門對極方向光害較嚴重, 再加上有一座山, 使缺乏練習的我未能在 510mm 焦長下找到極星拍攝並進行 PPA 測試, 所以放棄了測試, 將寶貴的晴朗時間拍了 M33, 玫瑰星雲 Rosette nebula (ngc2244) 和彗星 p21。
一晚三個目標都算是貪心了, 幸運地每個目標都勉強拍到, 除了成功拍到三個目標, 還有幾位攝星好友一起歡歡樂樂地玩通宵, 其間 James 夫婦也來一聚, 看看 raspberry pi guiding 的運作 。看來要特意在不太好天的晚上再進行PPA測試, 以免浪費好天的時間來測試, 亦可順便和有興趣 raspberry pi guiding 的同學作現場實習和分享。

Triangulum Galaxy M33 (16 x 4min)
5/10/2018
Tai Au Mun
Nikon D810a
QHY5II L mono (Guiding cam)
Raspberry pi auto guiding with Lin guider
Vixen GP2, ED 80sf

Rosette Nebula NGC2244 (10 x 4min)
5/10/2018
Tai Au Mun
Nikon D810a
QHY5II L mono (Guiding cam)
Raspberry pi auto guiding with Lin guider
Vixen GP2, ED 80sf
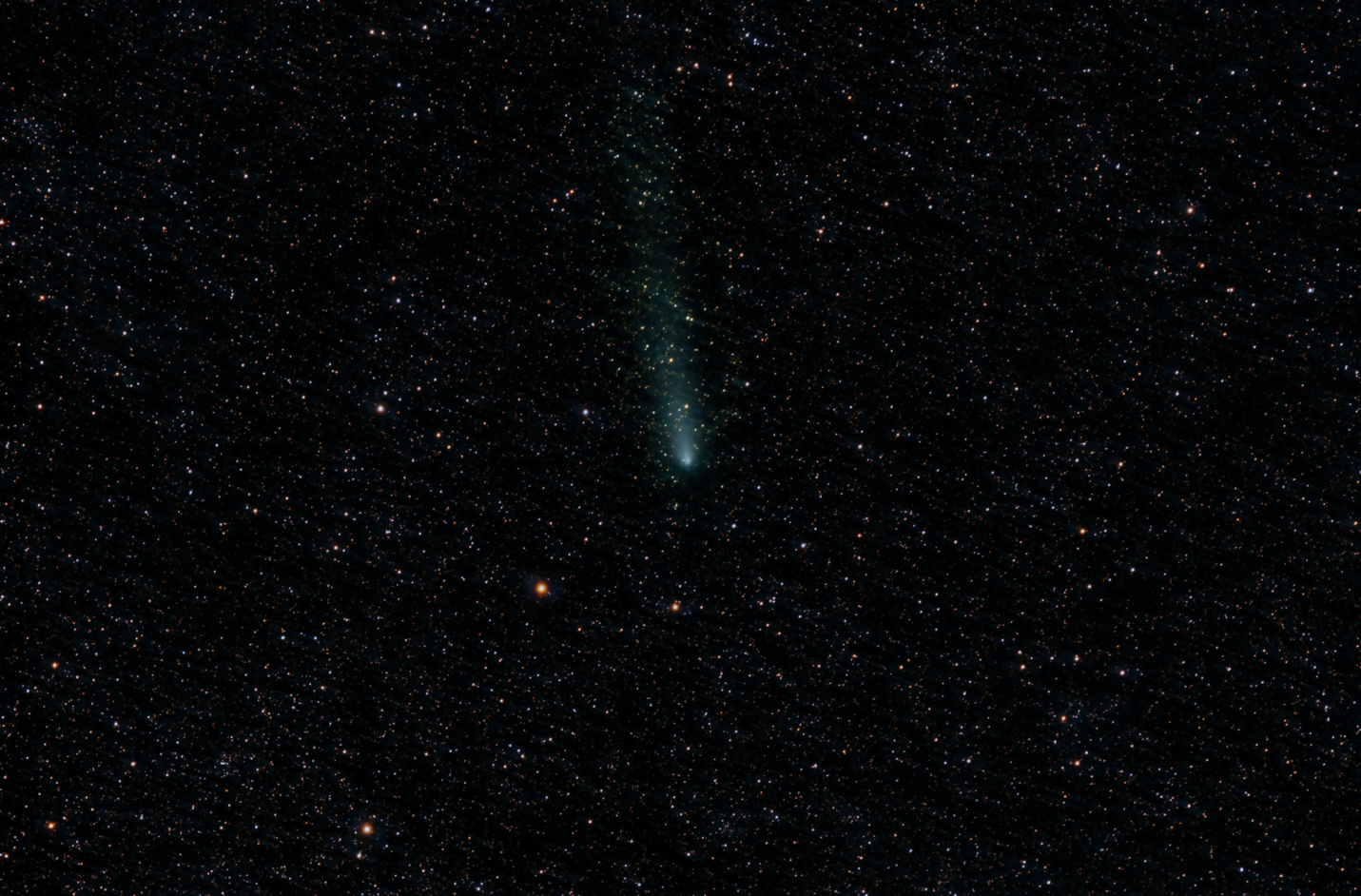
Comet 21P/Giacobini–Zinner (22 x 2min)
5/10/2018
Tai Au Mun
Nikon D810a
QHY5II L mono (Guiding cam)
Raspberry pi auto guiding with Lin guider
Vixen GP2, ED 80sf









